ros_1
This article contains 601 words.
Copyright: 署名-非商业性使用-相同方式共享
|
CC BY-NC-SA 2.5 CN
安装
官网
官网安装比较复杂,并且很容易中间出现奇怪的未知错误。
此次安装的是noetic版本,具体也没有细说版本区别,只是找到了一个可以用的。
一些问题
具体报错没有截图留存,但比较好解决,大多都是缺少什么配置,按照提示、搜索或者ai都能很好解决。
一键安装
据学姐所说,官网只是让感受一下,他们后面使用全是一键安装,但我没有尝试。
[鱼香]: https://fishros.org.cn/forum/topic/20/%E5%B0%8F%E9%B1%BC%E7%9A%84%E4%B8%80%E9%94%AE%E5%AE%89%E8%A3%85%E7%B3%BB%E5%88%97
测试
其实我至今仍未确定我的ubuntu到底出没出问题,毕竟一个安装好的ros,为什么会因为修复了一个问题,而缺少一个包。但我也不想再细究问题,修好ros后我不想再去尝试那个命令了。
乌龟测试是自带的经典样例,后面教程的入门也是在这个节点上做事。
基本就是三个命令:
1. `roscore`
1. `rosrun turtlesim turtlesim_node`
1. `rosrun turtlesim turtle_teleop_key`
需要开三个终端是比较奇怪的,最开始也不是很理解为什么。后面了解ros一些工作原理,知道了为什么需要一直运行。
入门学习
所有学习都基于小乌龟测试的那个教程,教程目前来看,给的示例比较详细,也很好上手操作,实操来问题不会太多。但我个人觉得,在示例中,一些步骤缺乏讲解,单纯摆在那里,我复制粘贴可以做到,但我不能独立写出这段代码。
教程十分详细,此处就不洋洋洒洒再记述一遍了,我随意列出一些自己想记录的。
基本框架
虽然教程把hello体验放在了前面,但按学长的顺序以及我学完后个人感受,个人认为ros的架构是最开始需要了解的,不然一切操作只是盲目的按图索骥。虽然学完这些后还是相当迷茫,不知道自己在干嘛,但对于自己的操作也能感受到一些,逐步理解。
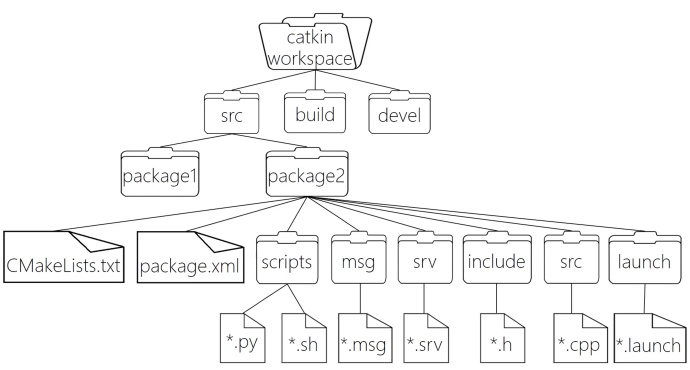
这张图片很清晰,从教程里截取的。
一些操作
roscore
rosrun